- Research Article
- Open access
- Published:
Camera Network Coverage Improving by Particle Swarm Optimization
EURASIP Journal on Image and Video Processing volume 2011, Article number: 458283 (2011)
Abstract
This paper studies how to improve the field of view (FOV) coverage of a camera network. We focus on a special but practical scenario where the cameras are randomly scattered in a wide area and each camera may adjust its orientation but cannot move in any direction. We propose a particle swarm optimization (PSO) algorithm which can efficiently find an optimal orientation for each camera. By this optimization the total FOV coverage of the whole camera network is maximized. This new method can also deal with additional constraints, such as a variable region of interest (ROI) and possible occlusions in the ROI. The experiments showed that the proposed method has a much better performance and a wider application scope. It can be effectively applied in the design of any practical camera network.
1. Introduction
Video cameras are widely applied to inspect and/or monitor interesting objects and scenes remotely and automatically [1, 2]. Often, to cover a large area, multiple cameras are connected together to form a camera/video network. By acting as an integrated unit, the camera network provides a much larger field of view (FOV) coverage than any single camera that constitutes it. However, the distribution of cameras (locations and orientations) will influence greatly the total FOV coverage of the camera network. With a fixed number of cameras, an optimal arrangement—putting cameras at the right locations and orientations—will produce the largest FOV coverage. It subsequently maximizes the effectiveness of the camera network deployment. This optimization problem has been studied by, for example, computer vision researchers from slightly different perspectives, such as 3D reconstruction [3, 4], target surveillance [5, 6].
The camera network FOV coverage optimization is defined as the using fewest possible cameras to monitor/inspect a fixed area or maximizing the FOV coverage of a network with fixed number of cameras. At present, the video camera is still an expensive sensor (not only in terms of financial cost but also in terms of bandwidth and computation power needed for transmitting and processing its output). That is why the coverage optimization has attracted a lot of research attention [7]. The oldest coverage optimization may be the Art Gallery Problem (AGP) [8]. The goal of AGP is to determine a minimal number of guards and their positions, so that all important sites in a polygon area can be fully under supervision. Because the human guards have no eyesight limitations (in comparison to the limited FOV of video cameras), applying AGP directly to camera networks is difficult. Erdem and Sclaroff [9] defined a camera placement problem similar to AGP, but with a more realistic camera model. For solving this problem, they proposed a 0-1 integer program model for the placement and then adopted a bound and branch approach. However, it is very difficult, if not impossible, to globally optimize the formed mathematical model when the problem size becomes large. To avoid this problem, Hsieh et al. [10] limited themselves to several special types of scenarios (lanes and circles) and one type of cameras (omni directional).
Recently, more considerations from real applications are taken into account. For instance, unlike the previous mentioned papers trying to minimize the overlapping FOV, Yao et al. [11] suggested that in some applications an overlapping FOV between the cameras is necessary. One such example is the object tracking. The trajectory of an object should be maintained across different camera views. For this purpose a sufficient uniform overlap between neighboring cameras' FOVs should be secured so that camera handover can be successful and automated. They proposed sensor-planning methods which add the handoff rate analysis. Zhao and Cheung [12] studied how to arrange the cameras for tracking visual tags. Their model incorporates realistic camera models, occupant traffic models, self-occlusion, and mutual occlusion possibilities.
The above-mentioned papers are about the full plan for deploying cameras in a network, where both location and orientation of each camera can be determined before constructing the network. Recently, Tao et al. [13, 14] studied another type of coverage optimization problem. In their system, the cameras were randomly spread over an area, the location of each camera could not be changed, but the orientation of each camera can be freely adjusted. Their system can be applied for military purposes where hundreds of cameras with wireless sensors are scattered by an airplane and quickly form a camera network to monitor a wide area. For large camera networks this system is more practical because in most situations the mounting locations are limited by the physical possibilities. Tao et al. proposed a potential field-based coverage enhancing algorithm (PFCEA) for solving this problem. In PFCEA, the FOV of each camera is regarded as a virtual particle and can be repelled by other cameras. The virtual force idea first appeared in [15], where it was used to deploy omni directional sensors. In [13, 14], if the virtual torque on the FOV of a camera is not zero, the camera will adapt its angle accordingly. They found the coverage of the camera network was maximized when the network reached an equilibrium.
In this paper, we base ourselves on the problem model and application of [13, 14]. Whereas, to overcome the disadvantage of the PFCEA algorithm (to be explained in Section 4), we propose to use particle swarm optimization (PSO) as the optimization engine. PSO was proposed by Kennedy and Eberhart to model birds flocking and fish schooling for food [16]. It is welcomed in practice, because it is easy to implement, needs few parameters, and does not require the objective function to be differentiable [17]. PSO has attracted a lot of research attentions in recent years. It has been successfully applied in, for example, training of neural networks [18], control of the reactive power and voltage [19], and cutting and packing problems [20]. We will show that PSO is also very effective for the camera network coverage problem. It can achieve global optimization. To prove its superior performance, we conduct an extensive comparison between PSO and PFCEA through several experiments. Further, we will theoretically analyze the optimization feasibility under different situations. We therefore find a new effective way for optimizing the camera network coverage problem that is much better than previous approaches. On the other hand, we explore a new field of applying the PSO algorithm.
Conci and Lizzi [21] also reported on the placement of cameras using PSO. In their method, they assumed a Rayleigh distribution for characterizing the distance of the object and a Gaussian distribution for modeling the horizontal camera FOV, and, their work mainly focused on an indoor environment where the number of cameras is small and the PSO performance is not an issue. Our work, on the contrary, is more intended for applications discussed in [13, 14] where hundreds of cameras or more are randomly distributed in an unknown area. Therefore we focus more on the performance of the algorithm and the relationships between the coverage improvement and the scale of the network. This makes our work complementary to [21].
The paper is organized as follows. We first define our problem model in Section 2. We then introduce our PSO algorithm in detail in Section 3. Subsequently, we experimentally show the superior performance of our PSO algorithm and make comparisons to the PFCEA in Section 4. We then give discussions about the results in Section 5, and finally, we conclude the paper in Section 6.
2. Problem Model
2.1. Camera FOV
The FOV of a camera is defined as a fan-shaped area as in Figure 1, where CAB defines the FOV of a camera C. The length of CA or CB is denoted by  , which defines the distance from the camera to the most distant objects that appear with an acceptable resolution. The camera angle of view is denoted by
, which defines the distance from the camera to the most distant objects that appear with an acceptable resolution. The camera angle of view is denoted by  . The vector
. The vector  defines the orientation of the camera and
defines the orientation of the camera and  is the azimuth. We use (
is the azimuth. We use ( ) to note the type of the camera.
) to note the type of the camera.

The FOV of a camera. The camera is located at C and oriented at θ. 2α is the camera angle of view. The fan area between CA and CB is the FOV of this camera.
2.2. Camera Viewing Coverage
Under aforementioned camera FOV model, the viewing coverage c of a camera is defined as the ratio of the area of the FOV of the camera to the total monitored area  as
as  . In the camera network, the observed regions of different cameras may be overlapped with each other. We use an approximate approach to calculate the coverage of a camera network. The total monitored area is divided into small regular grids. The coverage is then defined as the ratio of the number of covered grids to the total numbers of grids:
. In the camera network, the observed regions of different cameras may be overlapped with each other. We use an approximate approach to calculate the coverage of a camera network. The total monitored area is divided into small regular grids. The coverage is then defined as the ratio of the number of covered grids to the total numbers of grids:

2.3. Camera Number versus Network Coverage
Suppose  cameras of the same type (
cameras of the same type ( ) are distributed randomly over an area
) are distributed randomly over an area  . The coverage
. The coverage  , defined in the previous subsection as a probability of the total area being covered, can be estimated as follows [9]:
, defined in the previous subsection as a probability of the total area being covered, can be estimated as follows [9]:

or

Our simulations indeed showed that these equations are satisfied well for real situations. From (2) we can observe that the expected coverage can be improved by adding more cameras. However, when  is large enough, adding more cameras is not effective any more. On the other hand, if we can adjust the orientation of the cameras to decrease the overlap of the VOF of the cameras, we can save a lot of cameras.
is large enough, adding more cameras is not effective any more. On the other hand, if we can adjust the orientation of the cameras to decrease the overlap of the VOF of the cameras, we can save a lot of cameras.
2.4. Coverage Optimization Problem
Suppose  cameras of the same type (
cameras of the same type ( ) are randomly distributed in a two-dimensional space. Each camera cannot change its location, but may adjust its orientation to any direction. A control center receives information about the orientations of all cameras and can adapt them accordingly (e.g., through the PTZ mechanism). The objective of the control center is then to determine the optimal orientations of all cameras, (
) are randomly distributed in a two-dimensional space. Each camera cannot change its location, but may adjust its orientation to any direction. A control center receives information about the orientations of all cameras and can adapt them accordingly (e.g., through the PTZ mechanism). The objective of the control center is then to determine the optimal orientations of all cameras, ( ), so that the total coverage of the whole camera network becomes maximized.
), so that the total coverage of the whole camera network becomes maximized.
3. PSO for the Coverage Improvement
Our objective is to find the optimal orientation for each camera. But since the objective function (1) cannot be differentiated, the traditional gradient descent method will not work. PSO is a global optimizer which uses random search and does not require the objective function being differentiable. Moreover, it has shown good performance in many engineering optimization fields. Therefore we choose PSO to optimize the coverage of the camera network.
3.1. Concepts of PSO Algorithm
PSO was proposed by Kennedy and Eberhart (1995) to model birds flocking and fish schooling for food [16]. Since then it has been improved and applied in a lot of science and engineering fields. Similar to the genetic algorithm, a population of particles is used to search the solution space of an optimization problem. Each particle has a position vector and a velocity vector. The position vector is a potential solution of the optimization problem, and the velocity vector represents the step length of the update of the position. During the iterations of the PSO algorithm, all the particles vary their positions and velocities to search for the best solution. The optimal position found by the particles swarm is the final solution of the optimization. The basic framework of PSO for optimizing an objective function  can be described as follows:
can be described as follows:
Step 1.
Randomly generate  position vectors,
position vectors,  , each one is regarded as a particle and represents a potential solution of the optimization problem.
, each one is regarded as a particle and represents a potential solution of the optimization problem.
Step 2.
Randomly generate  velocity vectors,
velocity vectors,  , where
, where  is the step length for the update of
is the step length for the update of  .
.
Step 3.
Initialize  private best positions,
private best positions,  , by setting
, by setting  , where
, where  stores the best solution found by particle
stores the best solution found by particle  during its history of updates. The evaluation of a position vector being best or not is based on
during its history of updates. The evaluation of a position vector being best or not is based on  , the objective function of the optimization problem.
, the objective function of the optimization problem.
Step 4.
Initialize a global best position  , where
, where  is the best among
is the best among  .
.
Step 5.
While the stop criteria are not satisfied,
-
(1)
for
 , update each velocity vector
, update each velocity vector  by (4)
by (4)  (4)
(4) -
(2)
for
 , update each position vector
, update each position vector  by (5)
by (5)  (5)
(5) -
(3)
for
 , reevaluate each position vector
, reevaluate each position vector  , and set
, and set  if
if  is better than
is better than  ,
, -
(4)
set
 to be the best among
to be the best among  .
.
 , update each velocity vector
, update each velocity vector  by (4)
by (4) 
 , update each position vector
, update each position vector  by (5)
by (5) 
 , reevaluate each position vector
, reevaluate each position vector  , and set
, and set  if
if  is better than
is better than  ,
, to be the best among
to be the best among  .
.Step 6.
Output  as the final solution of the optimization problem.
as the final solution of the optimization problem.
In the above PSO algorithm, searching for the optimum is an analogy to the particle swarm flying in the space. The key step is to get the velocity vector by (4), which defines the step length of the position update during the search.  ,
,  , and
, and  are constants and rnd() is a random number in (
are constants and rnd() is a random number in ( ). Checking the right part of (4), we can see that
). Checking the right part of (4), we can see that  is composed of three components. The first one means that the flying is affected by the velocity in the last iteration. Therefore
is composed of three components. The first one means that the flying is affected by the velocity in the last iteration. Therefore  is often called the inertia factor. The second part means that the flying is affected by the private best position memorized by the particle. And the third part means that the flying is also affected by the global best position memorized by the system.
is often called the inertia factor. The second part means that the flying is affected by the private best position memorized by the particle. And the third part means that the flying is also affected by the global best position memorized by the system.
From (4) we can see that if the flying of each particle is attracted by the best particles found in the swarm, then a lot of exploitation will be performed near the best particle, and the convergence of algorithm can be assured. However, too fast convergence will make the algorithm fall into a local minimum. PSO uses the inertia factor and the rnd() to make the particles deviate from directly flying to the temporary best particle. Then much more space around can be explored and the algorithm can jump out from a local minimum. This explains why the PSO generally has a good performance.
3.2. PSO for the Coverage Improvement
The "position vector" defined in the general PSO is a potential solution  when we optimize an objective function
when we optimize an objective function  . The key problems for applying PSO are to define the position vector
. The key problems for applying PSO are to define the position vector  and the objective function
and the objective function  . To avoid confusion, we use for the cameras the terms "locations" and "orientations" instead of the "positions" throughout this paper.
. To avoid confusion, we use for the cameras the terms "locations" and "orientations" instead of the "positions" throughout this paper.
In our coverage improvement problem, we need to optimize the orientation vector of the cameras,  . The objective function is the total coverage defined in (1). The computation of (1) is based on the orientations, locations, and the type parameters (
. The objective function is the total coverage defined in (1). The computation of (1) is based on the orientations, locations, and the type parameters ( ) of all cameras. The locations and the type parameters of the cameras are the inputs to the algorithm. The orientations are what will be searched for. For all the experiments, we follow [22] to set
) of all cameras. The locations and the type parameters of the cameras are the inputs to the algorithm. The orientations are what will be searched for. For all the experiments, we follow [22] to set  and
and  in (4).
in (4).
In standard PSO, the velocity  is often bounded in a range of
is often bounded in a range of  to avoid a long jump of
to avoid a long jump of  that may result
that may result  missing the optimum. In our experiments, we do not limit the velocity, but transform the orientation of the camera to a value in the range of
missing the optimum. In our experiments, we do not limit the velocity, but transform the orientation of the camera to a value in the range of  . Then the update of the
. Then the update of the  is also bounded.
is also bounded.
The algorithm will stop when the number of iterations is equal to a predefined number, or a predefined coverage is reached. Because the locations of the cameras are randomly generated, we cannot predefine the coverage. Therefore in practice we often use a predefined maximum number of iterations. The complete algorithm is listed in Algorithm 1.
Algorithm 1: The PSO algorithm for the coverage optimization.
-
(1)
Randomly generate

 -dimensional orientation vectors
-dimensional orientation vectors  , and
, and 
 -dimensional velocity vectors
-dimensional velocity vectors . Then evaluate the coverage based on these orientation vectors and get the first private best
. Then evaluate the coverage based on these orientation vectors and get the first private bestposition
 and the global best
and the global best 
-
(2)
While the predefined iterations is not reached
-
(3)
for each particle
 to
to
-
(4)
calculate
 as (4);
as (4); -
(5)
calculate
 as??(5)
as??(5) -
(6)
transform
 in to
in to  and evaluate the coverage based on
and evaluate the coverage based on 
-
(7)
if
 is better than
is better than  , then update
, then update  .
. -
(8)
if
 is better than
is better than  , then update
, then update  .
. -
(9)
end for
-
(10)
end while
-
(11)
output the global best position
 , and the obtained coverage.
, and the obtained coverage.

 -dimensional orientation vectors
-dimensional orientation vectors  , and
, and 
 -dimensional velocity vectors
-dimensional velocity vectors . Then evaluate the coverage based on these orientation vectors and get the first private best
. Then evaluate the coverage based on these orientation vectors and get the first private best and the global best
and the global best 
 to
to
 as (4);
as (4); as??(5)
as??(5) in to
in to  and evaluate the coverage based on
and evaluate the coverage based on 
 is better than
is better than  , then update
, then update  .
. is better than
is better than  , then update
, then update  .
. , and the obtained coverage.
, and the obtained coverage.4. Experiments and Results
Three experiments were carried out to demonstrate the performance of the PSO for the coverage improvement of cameras. In Experiment 1, the performance and convergence of PSO were studied. In Experiment 2, PSO and PFCEA were compared to each other and the advantages of PSO were shown by the statistical data. In Experiment 3, the relationships between the coverage improvement and the configuration of the camera networks, including the number of the cameras and the type parameters of the cameras, were investigated.
Experiment 1.
In this experiment, the monitored area was set to be a  rectangle, and 150 cameras were randomly distributed in the rectangle. Each camera was of type (
rectangle, and 150 cameras were randomly distributed in the rectangle. Each camera was of type ( ,
,  ). To calculate the coverage, the rectangle was divided into
). To calculate the coverage, the rectangle was divided into  unit grids. For the PSO algorithms, 20 particles were used and the max iteration number was set to 1000.
unit grids. For the PSO algorithms, 20 particles were used and the max iteration number was set to 1000.
The global best coverage found in the first iteration was 0.52. After 1000 PSO iterations, the coverage was improved to 0.65. The convergence curve is displayed in Figure 2. The pictures of the initial layout and the final layout of the camera network are shown in Figure 3.
As indicated by (2), 150 cameras are expected to reach the coverage of 0.53. Our initial placement with the coverage of 0.52 was close to this. After the 1000 cycles of PSO, the coverage was raised to 0.65, that is, the coverage was improved for about 0.13. If we want to get this coverage without optimization, we will need to add another 58 randomly placed cameras (total of 208 cameras) as can be seen in Figure 2. In other words, we have saved 58 cameras by improving the coverage using the PSO.
Note that the improvement of the coverage varies with respect to the random initial configuration of the network, but in Experiment 2 we will show that the coverage improvement of the PSO is often stable.

The convergence curve of PSO on a 500 × 500 area with 150 randomly distributed cameras.

The coverage improvement of the PSO. (a) the initial layout. (b) The final improved layout.
Experiment 2.
To show the performance of the PSO further, we ran the program for 30 runs with the same camera number, camera type, and PSO parameters as in Experiment 1. We collected the coverage improvement data, where each run started from a random initial configuration. We also implemented PFCEA as described in [9, 10] to make a comparison. In PFCEA, if the virtual torque was greater than 10−6, the camera was rotated for  , otherwise the camera was regarded to be in equilibrium. The iteration of PFCEA was set to 360 in order for each camera to rotate for a full round (Our experiences also showed that 360 iterations are enough for the convergence of PFCEA, and more iterations did not improve the coverage any more.) The collected statistical data about the coverage improvement is shown in Table 1. From this we conclude that our PSO statistically more significantly improved the coverage than PFCEA and the performance was more stable.
, otherwise the camera was regarded to be in equilibrium. The iteration of PFCEA was set to 360 in order for each camera to rotate for a full round (Our experiences also showed that 360 iterations are enough for the convergence of PFCEA, and more iterations did not improve the coverage any more.) The collected statistical data about the coverage improvement is shown in Table 1. From this we conclude that our PSO statistically more significantly improved the coverage than PFCEA and the performance was more stable.
Actually, because of the limitation of the underlying principle employed, Tao et al.'s PFCEA algorithm cannot achieve the best possible optimization in a camera network. As illustrated in Figure 4(a), the two cameras are in equilibrium but the coverage of the two cameras is not as large as in Figure 4(b). In view of the optimization, PFCEA tries to use the virtual force as the gradient to search for the orientations, but because the cameras cannot move, its optimization ability is always limited.

An illustration of the disadvantage of PFCEA algorithm. (a) Since the two cameras are not allowed translational movement, they are in a balance state. This configuration is considered as the optimal solution by PFCEA but it is not really optimal because of the existence of overlaps. (b) A possible state with maximal coverage.
Experiment 3.
In this experiment, the relationships between the coverage and the three parameters  ,
,  , and α were investigated, and our PSO algorithm was further compared with the PFCEA of Tao. In each calculation, the positions of all the cameras were randomly generated and fed to PSO and PFCEA identically. The settings for PSO and PFCEA were the same as in Experiments 1 and 2.
, and α were investigated, and our PSO algorithm was further compared with the PFCEA of Tao. In each calculation, the positions of all the cameras were randomly generated and fed to PSO and PFCEA identically. The settings for PSO and PFCEA were the same as in Experiments 1 and 2.
The experiment was carried out in three phases with marginally varying the 3 parameters. Firstly we varied  , keeping
, keeping  , and α fixed. Then we varied
, and α fixed. Then we varied  , keeping
, keeping  , and α fixed. Finally we varied α, keeping instead
, and α fixed. Finally we varied α, keeping instead  and
and  fixed. The parameters of the camera networks are shown in Table 2, the results are illustrated in Figure 5.
fixed. The parameters of the camera networks are shown in Table 2, the results are illustrated in Figure 5.
The main results that we can conclude from Figure 5 are the following.
-
(a)
PSO performed better than PFCEA in all three phases. In most cases, the coverage improvement of PSO was nearly twice as large as that of PFCEA. We believe that this is because PSO is a global optimization technique and the global coverage is the objective of this optimization. In contrast, the objective of PFCEA is balancing the virtual torque and the optimization of coverage is indirect. Therefore no global optimal coverage can be obtained. That is why in some rare cases PFCEA even decreases the coverage, as can be seen in Figure 5(c) (camera angle of view equal to 2/12 π, the initial coverage equal to 0.279, and after the processing of PFCEA, the coverage became 0.267).
-
(b)
when the initial coverage was very small or very large, the improvement was small. This finding was first claimed in [9], and consistent with the experiments in this paper, as shown in Figure 5(a), 5(b), and 5(c). The reason to this is that if the initial coverage is very small, the overlap between the FOV of the cameras will also be small in general, and then the improvement cannot be very large. A contradictory case is that the small initial coverage is caused by the heavy overlap of FOV, but because the initial deployment is random, the coverage should obey (2), then this special case rarely appears. On the other hand, when the initial coverage is very large, there is little space left for improvement, and then it is impossible for any algorithm to find large uncovered spaces.
-
(c)
to get a clearer picture about the relationship between the initial coverage and the coverage improvement, we used the initial coverage as
 -axis and the coverage improvement as
-axis and the coverage improvement as  -axis, and we got three curves as in Figure 5(d), which are derived from Figures 5(a), 5(b), and 5(c). We can observe again that, when the initial coverage was too small or too large, the improvement was small. When the initial coverage was near 0.6, the PSO obtained the greatest coverage improvement.
-axis, and we got three curves as in Figure 5(d), which are derived from Figures 5(a), 5(b), and 5(c). We can observe again that, when the initial coverage was too small or too large, the improvement was small. When the initial coverage was near 0.6, the PSO obtained the greatest coverage improvement.Table 2 The parameters of the camera networks in Experiment 2. Figure 5 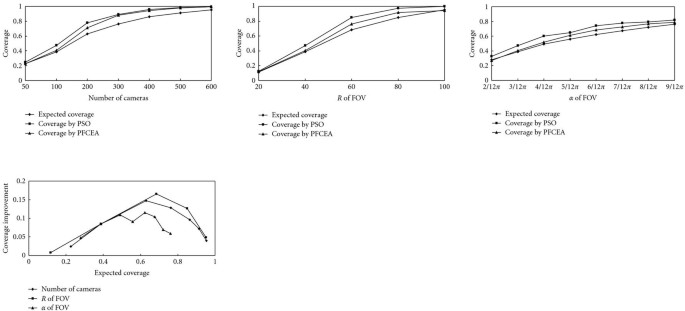
The relationships between the parameters and the coverage. (a) Relationship of (c, N); (b) relationship of (c, R); (c) relationship of (c, α); (d) relationship of the coverage increment by PSO and the initial coverage.
 -axis and the coverage improvement as
-axis and the coverage improvement as  -axis, and we got three curves as in Figure
-axis, and we got three curves as in Figure 
5. Discussions
5.1. The Expected Coverage for the Probably Maximal Coverage Improvement
The experiments in the previous section demonstrated that the PSO can improve the coverage the most when the initial coverage is about 0.6 but has less effect when it is close to 0 or 1. Considering that we can get the expectation (expected coverage) of this initial coverage by (2), we will explain the results theoretically. That is, we want to show that when the expected coverage is near 0.6, there will be maximum space for the improvement.
Assuming that there is no overlap between any two cameras in a camera network, we have a maximum covered area. Therefore, we can define the upper bound of the coverage ( ) of
) of  cameras in type of (
cameras in type of ( ) as follows.
) as follows.

With (2) and (6), we then have an upper bound of the coverage improvement

Let us consider the relationship of  and
and  with (
with ( ) and
) and  being constant. From (7) we can conclude that
being constant. From (7) we can conclude that  is a monotonically increasing function of
is a monotonically increasing function of  when
when  , and a monotonically decreasing function when
, and a monotonically decreasing function when  . Then we get the maximum improvement when
. Then we get the maximum improvement when  .
.
Replacing  with
with  in the expected coverage (2),
in the expected coverage (2),

We know that when  is large enough (e.g., above 100 in this paper),
is large enough (e.g., above 100 in this paper),  yielding
yielding  . This means that when the expected coverage near 0.6, we could get the maximum coverage improvement. This value is close to our observations from the experiments.
. This means that when the expected coverage near 0.6, we could get the maximum coverage improvement. This value is close to our observations from the experiments.
In Figure 6(a) we plot the expected coverage  and the upper bound of the coverage
and the upper bound of the coverage  as the function of
as the function of  , where
, where  is set to
is set to  , cameras are of type (
, cameras are of type ( ,
,  ). From this figure we derive Figure 6(b) in which we plot the coverage improvement
). From this figure we derive Figure 6(b) in which we plot the coverage improvement  as a function of the expected coverage
as a function of the expected coverage  . In Figure 6(b), we can clearly see that the upper bound of coverage improvement is small when the expected coverage is near 0 or 1, and is maximal when the expected coverage is near 0.6.
. In Figure 6(b), we can clearly see that the upper bound of coverage improvement is small when the expected coverage is near 0 or 1, and is maximal when the expected coverage is near 0.6.

Relationship of the coverage improvement and the expected coverage. (a) Curves of expected coverage, upper bound of coverage; (b) relationship of the expected coverage and the coverage improvement.
5.2. Adaptive ROI with the Proposed PSO
PFCEA adjusts the orientations of the cameras to enlarge the FOV of the camera network. However, the larger FOV does not always mean higher coverage. Some applications need the camera network to cover a special region of interest (ROI). As PFCEA cannot relate the ROI with the FOV of the camera network, new approaches must be developed. In our proposed PSO, ROI and FOV are related by (1), so our method can work well without any modification.
Always, constraints should be considered in real applications, such as ROI differences, and the occlusions by obstacles. We still assume that the cameras are already installed, and we are required to adjust orientations of the cameras to improve the coverage of the network. Given that areas that are not in the ROI need not be covered, the definition of coverage is changed into

(a) Different ROI at Different Time
In some applications, the ROI of the system varies depending on the surveillance objective. For example in Figure 7, two cameras installed on the wall should monitor  (working area) in the daytime, monitor
(working area) in the daytime, monitor  and
and  (two doors) in the night. The size of room is
(two doors) in the night. The size of room is  . The area
. The area  is a rectangle of
is a rectangle of  and located near the center of the western wall. The area
and located near the center of the western wall. The area  and
and  are rectangles of
are rectangles of  and located at the two corners beside the eastern wall. Two cameras
and located at the two corners beside the eastern wall. Two cameras  and
and  are of type (
are of type ( ,
,  ) and installed at the center of northern and southern wall of the room.
) and installed at the center of northern and southern wall of the room.
Then we can use PSO to compute the optimal orientation of the two cameras in the two periods. The results are listed in Table 3, and shown in Figures 8(a) and 8(b) illustrating the solution in the daytime and the night. Note that because the ROI in the daytime and in the night is different, we cannot compare the coverage in the two cases.

The results of PSO for different ROIs. (a) Two cameras C1 and C2 are arranged to monitor A1 in the daytime. (b) They monitor A2 and A3 in the night.

The results of PSO when ROI is occluded. (a) Camera C1 monitors A and camera C2 monitors B. (b) When the obstacle W appears, PSO finds new orientations for the two cameras.
(b) ROI Is Occluded by Obstacle(s)
In this example shown in Figure 8, a room of  is monitored by two cameras
is monitored by two cameras  and
and  , where
, where  located at the northwest corner and
located at the northwest corner and  located at the southeast corner and both cameras are of type (
located at the southeast corner and both cameras are of type ( ,
,  ). The ROI is the area occupied by two rectangles
). The ROI is the area occupied by two rectangles  and
and  with the same size of
with the same size of  .
.
At first, we get a solution by PSO as in Figure 8(a), where camera  is arranged to monitor area
is arranged to monitor area  and camera
and camera  is arranged to monitor
is arranged to monitor  . Figure 8(b) shows the solution when an obstacle
. Figure 8(b) shows the solution when an obstacle  appears in the room and the initial FOV of
appears in the room and the initial FOV of  is occluded. As a result, the PSO provides a new solution, letting
is occluded. As a result, the PSO provides a new solution, letting  monitor
monitor  and
and  monitor
monitor  . The results are listed in Table 4. We note that the coverage is maintained after the adjustment of the orientations of the two cameras.
. The results are listed in Table 4. We note that the coverage is maintained after the adjustment of the orientations of the two cameras.
6. Conclusions
In this paper, we proposed a PSO algorithm to greatly improve the coverage of a camera network in which the orientation of each camera can be freely adjusted. Our results showed that the coverage can be greatly improved by adjusting the orientation of each individual camera. In this way we may save a large amount of cameras. The algorithm can improve the coverage the most when the initial coverage is about 0.6. But it has less effect when the initial coverage is near 0 or 1. Our way of optimizing the camera network coverage problem outperforms current solutions from PFCEA. We also showed that our approach can deal with variable ROIs and with occlusions. Our findings suggest that the optimization of orientations of cameras should attract more attentions in the design of camera networks. We further believe that the method provided in this paper can be applied in the camera networks to adjust not only the orientation but also the position of the camera.
References
Lei B, Xu L-Q: Real-time outdoor video surveillance system with robust foreground detection and state-transitional object management. Pattern Recognition Letters 2006, 15: 1816-1825.
Lei B, Xu L-Q: From pixels to objects and trajectories: a generic real-time outdoor video surveillance system. Proceedings of the IEE International Symposium on Imaging for Crime Detection and Prevention ( ICDP '05), June 2005, London , UK 117-122.
Dunn E, Olague G: Pareto optimal camera placement for automated visual inspection. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS '05), 205 3821-3826.
Olague G, Mohr R: Optimal camera placement for accurate reconstruction. Pattern Recognition 2002, 35(4):927-944. 10.1016/S0031-3203(01)00076-0
Ercan AO, Gamal AE, Guibas LJ: Camera network node selection for target localization in the presence of occlusions. Proceedings of the Distributed Smart Cameras, October 2006
Ercan AO, El Gamal A, Guibas LJ: Object tracking in the presence of occlusions via a camera network. Proceedings of the 6th International Symposium on Information Processing in Sensor Networks (IPSN '07), April 2007 509-518.
Murray AT, Kim K, Davis JW, Machiraju R, Parent R: Coverage optimization to support security monitoring. Computers, Environment and Urban Systems 2007, 31(2):133-147. 10.1016/j.compenvurbsys.2006.06.002
O'Rourke J: Art Gallery Theorems and Algorithms. Oxford, New York, NY, USA; 1987.
Erdem UM, Sclaroff S: Optimal placement of cameras in floorplan to satisfy task requirements and cost constraints. Proceedings of the 5th Workshop on Omnidirectional Vision, Camera Networks and Non Classical Cameras (Omnivis '04), 2004, Prague, Czech Republic
Hsieh YC, Lee YC, You PS, Chen TC: An immune based two-phase approach for the multiple-type surveillance camera location problem. Expert Systems with Applications 2009, 36(7):10634-10639. 10.1016/j.eswa.2009.02.077
Yao Y, Chen CH, Abidi B, Page D, Koschan A, Abidi M: Can you see me now? Sensor positioning for automated and persistent surveillance. IEEE Transactions on Systems, Man, and Cybernetics—Part B 2010, 40(1):101-115.
Zhao J, Cheung SCS: Optimal visual sensor planning. Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS '09), May 2009 165-168.
Tao D, Ma HD, Liu L: Virtual potential field based coverage-enhancing algorithm for directional sensor networks. Ruan Jian Xue Bao/Journal of Software 2007, 18(5):1152-1163. 10.1360/jos181152
Tao D: Research on coverage control and cooperative processing method for vedio sensor networks, Doctoral dissertation. Beijing University of Posts and Telecommunications, Beijing, China; 2007.
Zou YI, Chakrabarty K: Sensor deployment and target localization based on virtual forces. Proceedings of the 22nd Annual Joint Conference on the IEEE Computer and Communications Societies (INFOCOM '03), April 2003 1293-1303.
Kennedy J, Eberhart R: Particle swarm optimization. Proceedings of the IEEE International Conference on Neural Networks, December 1995 1942-1948.
Brandstätter B, Baumgartner U: Particle swarm optimization—mass-spring system analogon. IEEE Transactions on Magnetics 2002, 38(2):997-1000. 10.1109/20.996256
van den Bergh F, Engelbrecht AP: Training product unit networks using cooperative particle swarm optimisers. Proceedings of the International Joint Conference on Neural Networks (IJCNN '01), July 2001 1: 126-131.
Yoshida H, Kawata K, Fukuyama Y, Takayama S, Nakanishi Y: A Particle swarm optimization for reactive power and voltage control considering voltage security assessment. IEEE Transactions on Power Systems 2000, 15(4):1232-1239. 10.1109/59.898095
Xiao RB, Xu YIC, Amos M: Two hybrid compaction algorithms for the layout optimization problem. BioSystems 2007, 90(2):560-567. 10.1016/j.biosystems.2006.12.007
Conci N, Lizzi L: Camera placement using particle swarm optimization in visual surveillance applications. Proceedings of the IEEE International Conference on Image Processing (ICIP '09), November 2009 3485-3499.
Clerc M, Kennedy J: The particle system—exploration, stabilty, and convergence in a multidimensional complex space. IEEE Transactions on Evolutionary Computation 2002, 6(1):53-58.
Acknowledgments
The authors thank all the anonymous referees for their helpful comments. This research is supported by the National Natural Science Foundation of China (60972162), the Science Funding of Hubei Provincial Department of Education (Q20101205), Program of Science and Technology R and D project of Yichang (A2010-302-10), and the Science Funding of CTGU (KJ 2009B014).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Xu, YC., Lei, B. & Hendriks, E.A. Camera Network Coverage Improving by Particle Swarm Optimization. J Image Video Proc. 2011, 458283 (2011). https://doi.org/10.1155/2011/458283
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1155/2011/458283